|
Curiethérapie de la
prostate robotisée |
|
|
La
curiethérapie de la prostate, utilisée dans le traitement du cancer, consiste
à insérer des grains radioactifs dans la prostate pour détruire les zones
cancéreuses. Cette procédure est généralement réalisée sous contrôle
échographique peropératoire par sonde endorectale.
Nous nous sommes intéressés à l’automatisation de ce geste dont l’exécution,
souvent longue, exploite peu le savoir-faire du clinicien. La procédure
manuelle rend par ailleurs difficile la correction du planning lorsque la
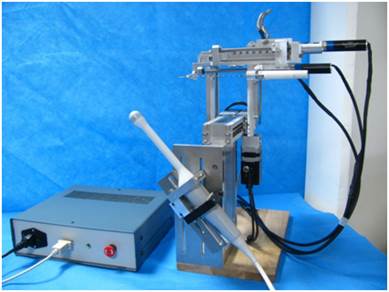
prostate se déplace et se déforme. Nous avons conçu une première version d’un
robot de curiethérapie permettant le placement dans la prostate des aiguilles
par rapport à un planning dosimétrique. Le robot s’installe sur le stepper
maintenant la sonde échographique*. Il combine un système de positionnement
de l’aiguille à 5 degrés de liberté et un système d’insertion de l’aiguille à
2 degrés de liberté. Le contrôle du robot est couplé aux informations de
l’image échographique peropératoire tridimensionnelle. Une
version utilisable au bloc opératoire ainsi qu’un protocole clinique a été
réalisée pour une faisabilité clinique sur quelques patients. *
Sur la photo du haut, on voit le robot et la sonde échographique 3D ainsi que
le rack de commande ; sur celle du bas, la version clinique les premiers
tests de compatibilité avec l’environnement clinique. Cf.
vidéo des premiers
tests sur fantôme avec prise en compte des bougés et déformations de la
prostate. |
|
|
Publications : Veron B, Hungr
N, Troccaz J. Making a clinical device from a laboratory prototype: from
Prosper to ProsperOR 6th Joint Workshop on New Technologies
for Computer/Robot Assisted Surgery, September 12-14, 2016 in Pisa Hungr N.
Design and evaluation of robotic systems for medical image guided needle
interventions. PhD thesis, January 2014, Université
de Grenoble (PDF).
2nd Prix de these GDR Robotique 2015 Hungr N,
Baumann M, Long JA, Troccaz J. A 3D Ultrasound Robotic Prostate Brachytherapy
System with Prostate Motion Tracking. IEEE
Transactions on Robotics, 2012, 28(6) : 1382-1397 (PDF) Thèse J-A Long, urologue, en
2012. Thèse N Hungr en 2014 en français accessible
sur TEL |
|
|
Collaborations: CHU de Grenoble (Pr Bolla,
Service de Radiothérapie et Pr Descotes, service
d’urologie), société KOELIS |
|
|
Financements :
Projet ANR Tecsan 2007 « Prosper » (Prostate Perineal Access) ; ANR Equipex
Robotex (sous-réseau « robotique
médicale ») ; ANR labex CAMI. |
|
|
Status :
SUSPENDU La compatibilité électromagnétique du prototype
préclinique n’a pas pu être obtenue et aurait nécessité de lourds
investissements supplémentaires. La validation sur patients n’a donc pas pu
être réalisée. De profundis ! C’est un risque de la recherche translationnelle. |
|
|
Contact : jocelyne.troccaz@univ-grenoble-alpes.fr
|
|