|
Planification et
contrôle de trajectoires complexes pour une aiguille |
|
|
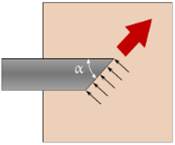
Les
aiguilles de ponction utilisées en clinique peuvent être plus au moins
déformables et lorsque leur extrémité est biseautée la trajectoire de l’aiguille
est déviée dans la direction du biseau selon un arc de cercle dépendant de la
rigidité de l’aiguille. Plutôt que de combattre ce phénomène, il est
intéressant d’en jouer pour réaliser des trajectoires complexes. Nous
développons une telle méthode dans le cadre de l’insertion d’aiguilles de
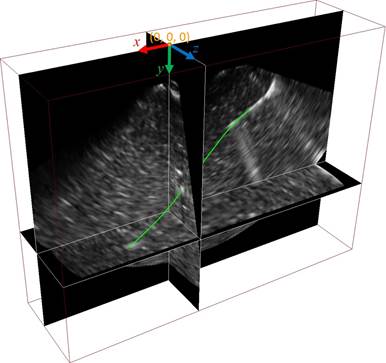
curiethérapie (cf. projet PROSPER). La planification et le contrôle des
mouvements (translations et rotations) de l’aiguille nécessitent sa détection
temps dans les images échographiques. La méthode développée combine filtre de
Kalman sans parfum, asynchrone, modèle cinématique
simple, méthode bayésienne pour la détection robuste de la position de
l’aiguille dans l’image échographique. La planification rapide de la
trajectoire est basée sur l’utilisation de méthode de type Rapid Random Tree. Le
système a été testé avec succès sur fantôme homogène ou inhomogène, avec ou
sans obstacles, avec suivi de cible mobile et sur tissus biologiques ex-vivo.
Une première faisabilité a été testée au laboratoire d’anatomie de la Faculté
de Médecine de Grenoble (avec le Dr Gaëlle Fiard) |
|
|
Publications : Lapouge G, Poignet P,
Troccaz J. Towards 3D ultrasound guided needle steering robust to
uncertainties, noise and tissue heterogeneity. IEEE TBME, (selected for the “IEEE TBME Highlights”) – 2021:68:(4):1166-1177 (PDF) Lapouge G, Troccaz J, Poignet P. Multi-rate
unscented Kalman filtering for pose and curvature
estimation in 3D ultrasound-guided needle steering. (PDF) Control Engineering Practice, 2018:80:116-124 Thèse
sde G.Lapouge (2020) et
P.Mignon (2016) accessible sur thèses
en ligne |
|
|
Media :
si vous voulez
comprendre mieux ces travaux, une très belle vidéo sur Youtube de « vulgarisation » dans le style de l’émission
« C’est pas sorcier » réalisée par G.Lapouge |
|
|
Collaborations: Travaux co-encadrés
par Philippe POIGNET, Professeur, LIRMM |
|
|
Financements :
Thèse de P.Mignon financée par le labex
CAMI, thèse de G.Lapouge financée par une bourse de
l’Ecole Normale Supérieure |
|
|
Status :
EN SOMMEIL |
|
|
Contact : jocelyne.troccaz@univ-grenoble-alpes.fr
|
|