|
Teleos (Technology
Enhanced Learning Environment for Orthopaedic Surgery) |
|
|
Le
geste chirurgical, qu’il soit assisté par ordinateur ou qu’il soit
conventionnel, est un geste généralement complexe, faisant appel à de
nombreuses connaissances explicites ou non, le plus souvent réalisé debout,
mettant en jeu des boucles perceptivo-motrices élaborées. Le contexte de ces
gestes est une situation potentiellement « critique » (temps
limité, dangerosité éventuelle du geste, état du patient, etc.) et a été peu
voire pas analysé selon cet axe. L’évaluation des systèmes d’assistance se
fait traditionnellement sur plan technique puis sur un plan de la finalité
clinique (meilleure efficacité thérapeutique, diminution des problèmes post-opératoires, coûts diminués, etc.). Peu d’attention
a été prêtée à la capacité qu’a le chirurgien à réaliser une tâche, voire à
utiliser des informations qui lui sont fournies par un système d’assistance
au geste chirurgical dans des conditions les plus extrêmes (fatigue, double
tâche, stress). Dans le cadre du projet TELEOS nous travaillons à cette
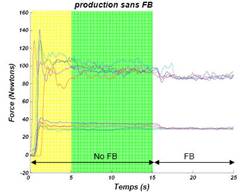
thématique. Le travail réalisé concerne le rôle des informations haptiques dans l’apprentissage et la réalisation du geste
en orthopédie et le potentiel d’un retour d’informations auditives. |
|
|
Publication : Cuisinier R, Olivier I, Troccaz J, Vuillerme N, Nougier V. Short term memory effects of an auditory biofeedback on isometric force control: Is there a differential effect as a function of transition trials? Hum Mov Sci. 2011, 30:436-445 (pdf ) |
|
|
Financement :
Projet ANR Blanc 2006 Teleos
(responsable Vanda Luengo, LIG) |
|
|
Contact :
jocelyne.troccaz@imag.fr ouvincent.nougier@ujf-grenoble.fr |
|