|
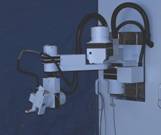
Passive Arm with Dynamic Constraints (PADyC) |
|
|
Medical robotics faces the need for interacting with a clinical expert
and offering a perfect safety for both the medical staff and the patient. We
proposed a new concept, the « synergistic robot » also called
« hands on robot » by other authors which carries the
instrument held by the clinician and whose function is to limit the
instrument motions with respect to a pre-defined surgical plan. This allows
reaching a target position, to follow a trajectory or to stay inside an
authorized region. The mechanical architecture implementing programmable
constraints is passive (the robot cannot move by itself and is actuated by
the user) and integrates a patented mechanism based on clutchable
freewheels. |
|
|
References: O. Schneider, J. Troccaz. A Six Degree of Freedom Passive Arm with Dynamic
Constraints (PADyC) for Cardiac Surgery
Application: Preliminary Experiments. Computer-Aided
Surgery, special issue on medical robotics, 6(6), pp340-51, 2001 (PDF) J. Troccaz and Y. Delnondedieu.
Semi-active guiding systems in surgery. A two-dof
prototype of the passive arm with dynamic constraints (PADyC).
Mechatronics, 6(4):399--421, June 1996. |
|
|
Collaborations: Praxim, Alpes Instruments |
|
|
Status: SLEEPING protected by several patents. 2 PhDs. Several
working protptypes (3 axes version for feasability, 6 axes version for application to
pericardial punctures, (usable for other applications), 2 axes light version
for knee surgery. Experiments on phantoms.
|
|
|
More information: http://www.surgetics.org section
« Scientifique/PADyC » (in french) |
|
|
Contact: jocelyne.troccaz@imag.fr |
|