|
Planning and control of complex trajectories for needles – needle
steering |
|
|
Clinical
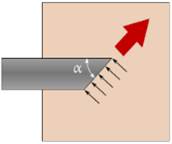
puncture needles may be more or less rigid and deformable. Moreover beveled
tips result in deviation of the trajectory in the direction of the tip. The curvature
of the resulting arc depends in the needle flexibility. Instead of fighting
with this phenomenon, it can be used to produce complex trajectories. We
develop such a needle steering approach in the context of robot-assisted
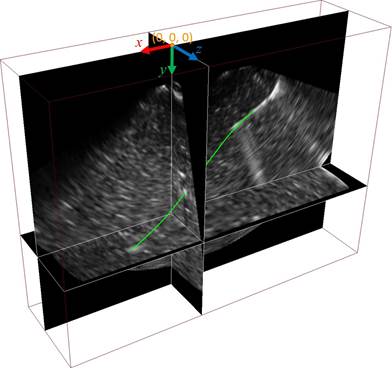
brachytherapy (cf. PROSPER project). Needle
motion (translations et rotations) planning and control requires real-time
needle detection in ultrasound images. The developed method combines
multi-rate unscented Kalman filtering, a simple
kinematic model, Bayesian classification for the robust of detection of the
needle position in the ultrasound image. Trajectory generation is based on Rapid Random Tree planning. Needle
control can be achieved in real-time with good
accuracy. The system was successfully tested on phantoms
(homogeneous or not, with/without obstacles, with static or moving targets)
and on ex-vivo biological tissue. A first feasibility has
been conducted in the Anatomy department of the Grenoble School of
Medicine (with Dr Gaëlle Fiard). |
|
|
References : Lapouge G, Poignet P,
Troccaz J. Towards 3D ultrasound guided needle steering robust to
uncertainties, noise and tissue heterogeneity. IEEE TBME, (selected for the “IEEE TBME Highlights”) – 2021:68:(4):1166-1177 (PDF) Lapouge G, Troccaz J, Poignet P. Multi-rate
unscented Kalman filtering for pose and curvature
estimation in 3D ultrasound-guided needle steering. (PDF)
Control Engineering Practice,
2018:80:116-124 Mignon P, Poignet P,
Troccaz J. Automatic Robotic Steering of Flexible Needles from 3D Ultrasound
Images in Phantoms and Ex-vivo Biological Tissue (PDF). Annals of Biomedical Engineering,
2018:46(9):1385-1396 PhD theses of Paul Mignon (2016) and Guillaume Lapouge (2020), in French, accessible on thèses en ligne |
|
|
Collaborations: Co-supervision
of the PhDs by Philippe POIGNET, Professor, LIRMM |
|
|
Funding : PhD
thesis of Paul Mignon funded by labex CAMI – PhD thesis
of Guillaume Lapouge funded by Ecole
Normale Supérieure |
|
|
Status : SLEEPING |
|